

产品简介
FishSounder系列多波束图像声呐是一款实时的高分辨率前视成像声呐,具备成像速度快、高分辨率显示图像等性能特点,在水下具有广泛的应用。无论是清澈或浑浊水体,均能提供载体水下的声学视觉,实现目标探测、识别、碰壁、探障等功能,是水下目标识别、探测、检查的必备选择。
工作原理
声呐是一种机械装置,通过旋转传感器(发射机和接收机)来扫描其前方或周围的扇区。在每个换能器位置,一个声脉冲将被传输到水中,接收器收集的回声将被绘制到显示器上。根据所需的分辨率,图像可能需要几十秒才能更新,在此期间声呐的任何移动都可能会玷污和扭曲图像。与机械声呐不同,FishSounder是一种没有运动部件的多波束声呐,它是一组接收器,从单个传输脉冲中收集回波,并使用称为“波束形成”的过程将数据数学地组合成图像。这允许每秒多次生成图像,并像摄像机的输出一样实时查看。
FishSounder系列多波束图像声呐具有低频和高频操作模式,允许操作员分别在更长的声学范围或高分辨率图像之间进行选择。
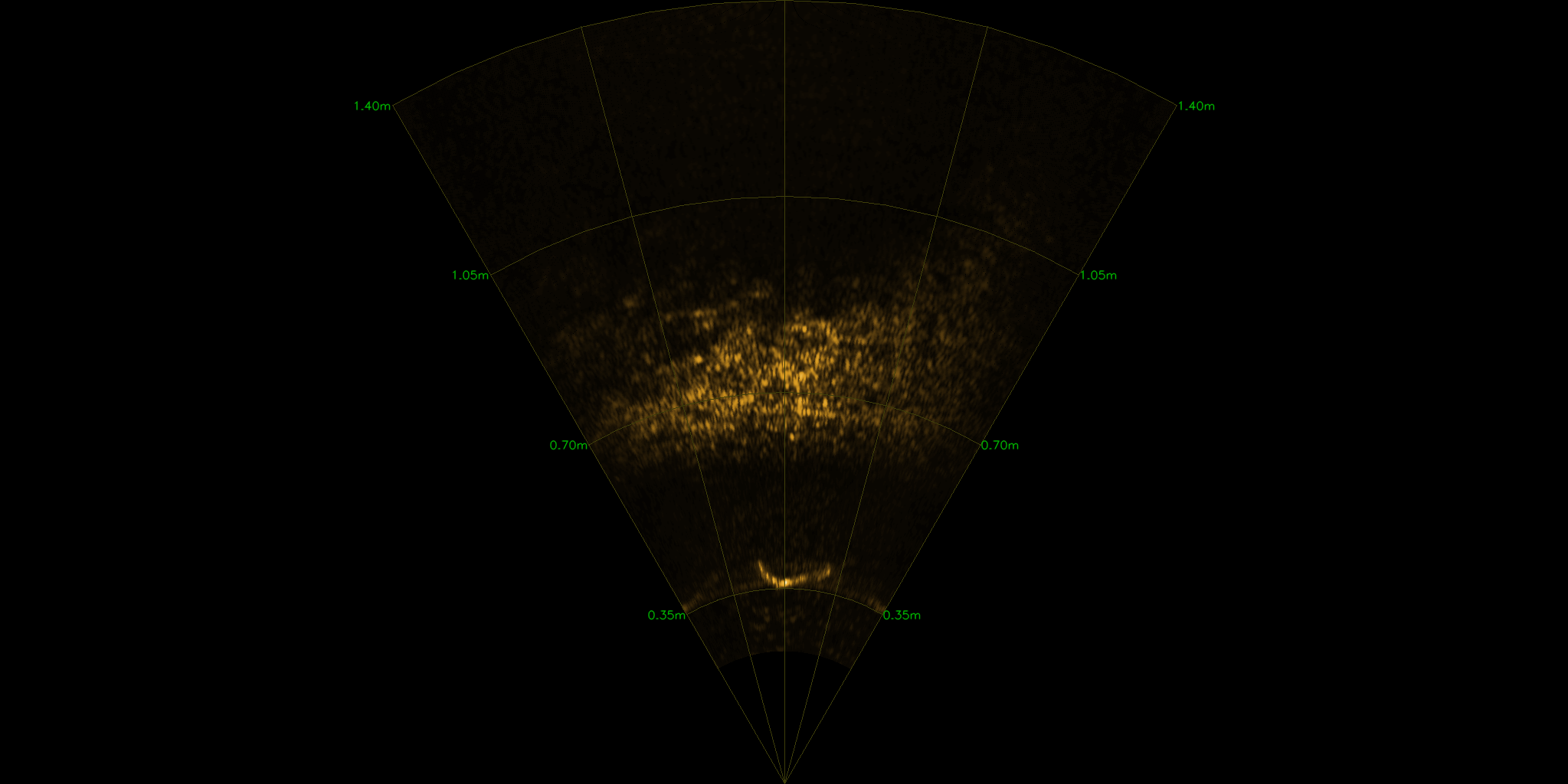
声呐图像需要经过一些培训和练习才能解释,因为在操作员看来,显示为覆盖其前方区域的自上而下视图,根据所选频率模式,声呐图像可以在水平方向上照亮130°,垂直方向上照亮20°。显示器上目标和纹理的亮度表示它们反射了多少声音(气体或致密材料反射的声音比泥浆、沙子和淤泥多),而声音阴影可以根据物体或海底的几何形状投射。
通过将已知的水中声速(VOS–“c”)与接收回声的时间(“t”)相结合,声呐可以计算声音传播的距离(“d”)。
由于声音必须从声呐传到目标物体,然后再传回,所以声呐和目标之间的距离(‘r’)是总距离的一半。
在现实世界中,声呐将在前方看到多个目标。发射的声音脉冲将在不同的时间反射出每个目标,但接收器将在相当于最大工作范围两倍的时间段内记录所有回波(对于往返于目标的声音)。
接收到的回波被组合成单个接收信号,其时间位置直接与距离相关,而每个回波的强度取决于目标的反射程度。
密度与水非常不同的目标(如气体/空气或岩石/混凝土)将具有很强的反射性和回波,而来自泥浆、淤泥、沙子和植物等材料的回波将具有较弱的回波。
亮点优势
1.体积小、重量轻、功耗低、安装方式灵活方便;
2.自硏显控软件,实时显示水下探测的图像和数据。
技术参数
|
型号 |
FS2000D |
|
工作频率 |
1.2MHz/2.1MHz |
|
最大量程 |
50m/10m |
|
最小量程 |
0.1m |
|
量程分辨率 |
2.5mm/2.5mm |
|
最大刷新率 |
40Hz |
|
水平开角 |
130°/60° |
|
垂直开角 |
20°/12° |
声束模式
当考虑声呐如何工作时,把声呐想象成在黑暗的房间里使用的手电筒可能会有所帮助。使用者只能看到火炬照亮的房间部分,如果火炬的光束较窄,则其视野会减小。
类似地,声呐对声音“照亮”的区域具有固定的宽度和高度,这些被称为水平和垂直波束模式。
目标可见性
位于声呐波束内的物体(或目标)将被声学“照亮”,并可以接收其回波(目标),而位于此之外的对象(目标)可能不会出现在声呐显示器上。
应该注意的是,尽管上面的图表显示了声呐波束的边界,但这实际上代表了声波的“半功率”水平。该区域外的垂直目标可能仍然可以在显示器上看到,但随着它们远离波束模式,其回波水平将迅速降低。
在水平方向上,由于“自顶向下”显示的宽度固定,因此不会显示光束模式之外的图像。
声呐无法确定回波的垂直到达角,因此,如果两个目标位于声呐前方,彼此垂直距离相同,声呐会将这两个目标显示为它们的回波组合的单一结果。
声学阴影
声呐和火炬之间的相似性继续存在,因为声呐的“照明”可用于产生声阴影,这对操作员确定声呐前方目标的高度、形状和方向非常有帮助。
如前所述,可以将显示器视为FishSounder前方的自顶向下(或卫星)视图。
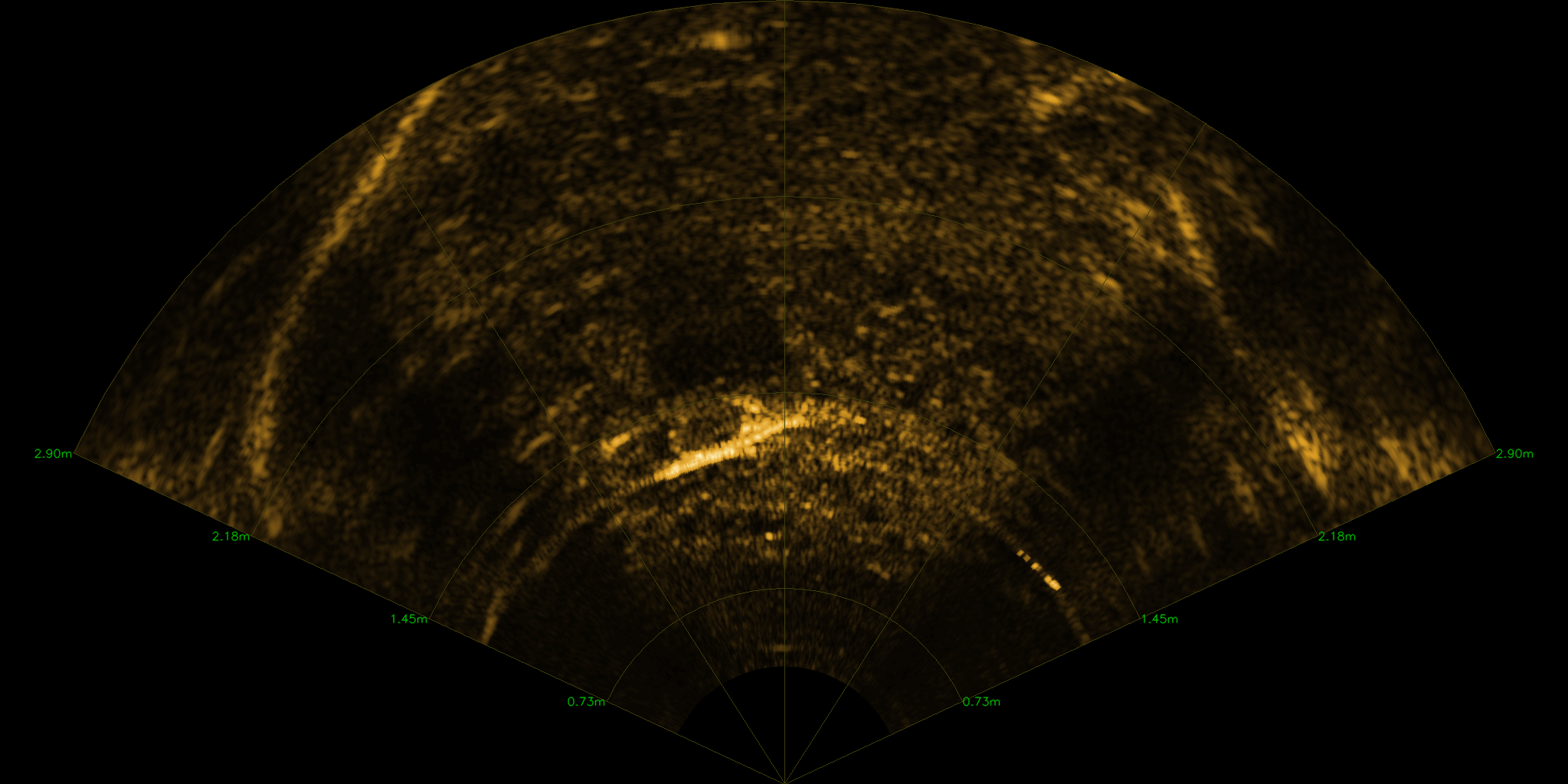
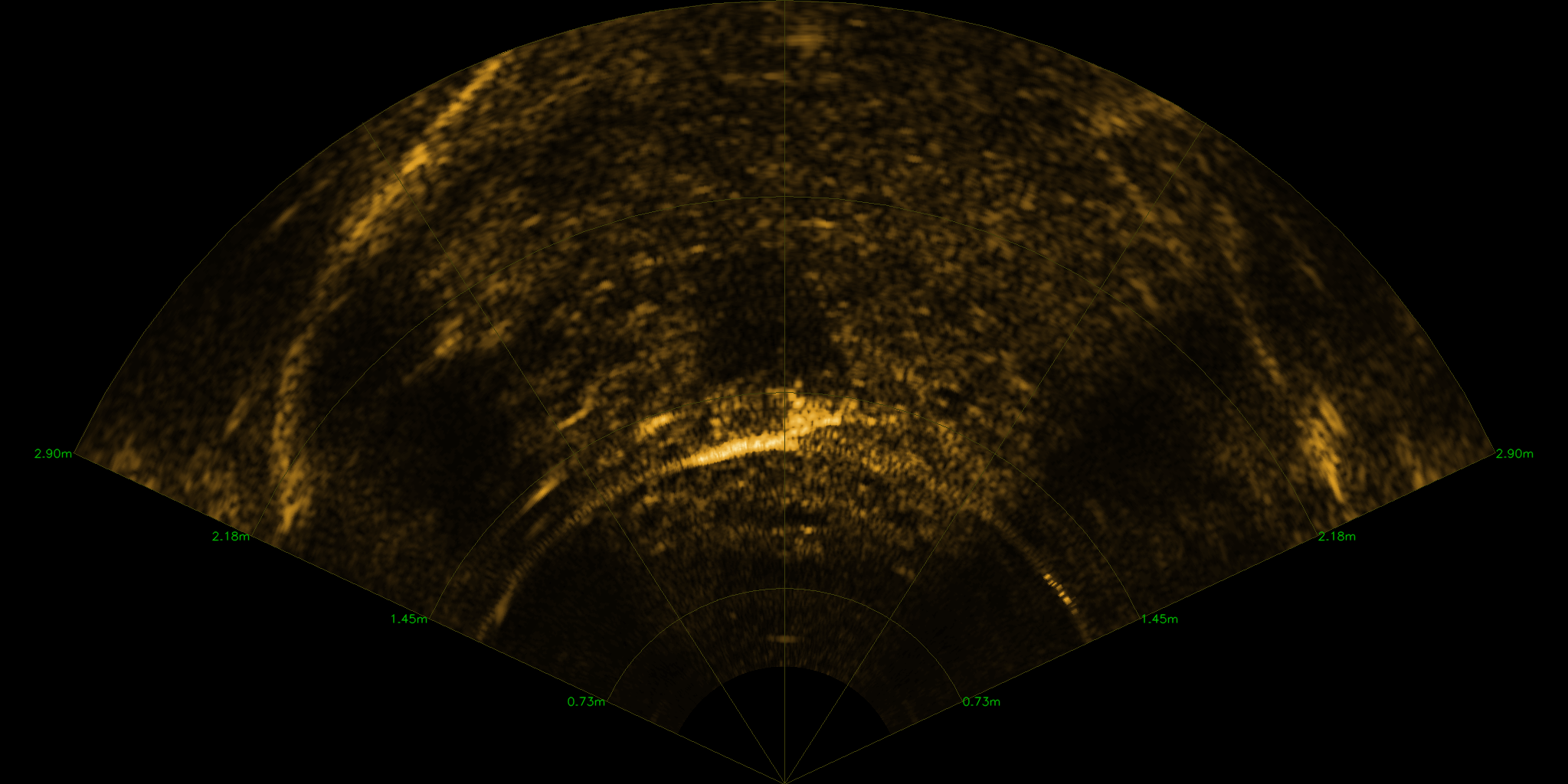
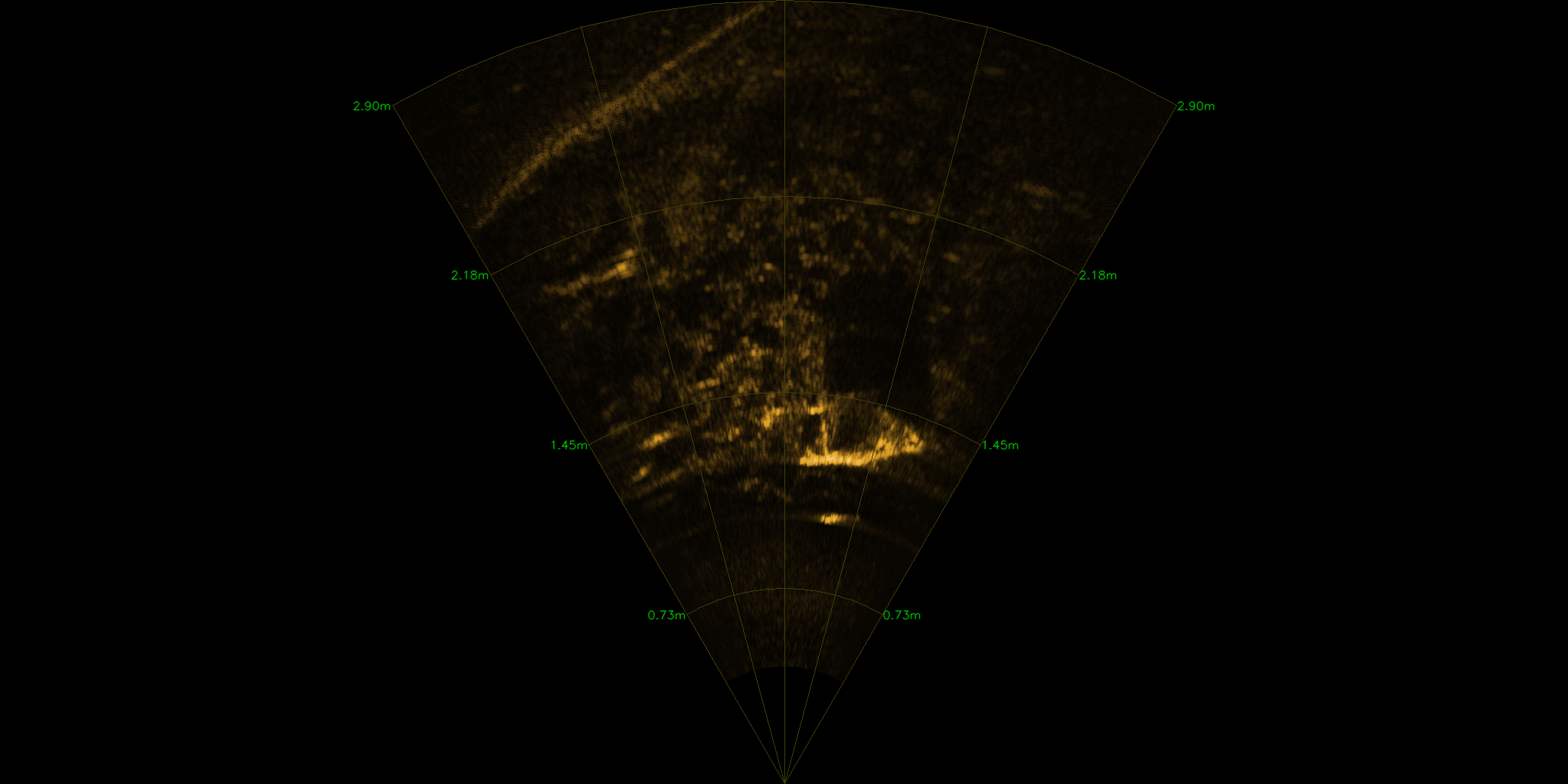
声呐效果图集

联系方式:
王经理 15882399421(微信同号)
邮箱:807788850@qq.com
地址:成都高新区合瑞南路7号1栋2楼1号
